MECHANICAL FLOWER
The mechanical flower combines computer vision and bus servo together, to physically interact with tourists. This installation aims to obtain strategies for how to design safe and feasible outdoor interactive installations.
Prototype Model_One Model_Two Model_ThreeV1 | Prototype
- Date: 2021 SEP
- Type: Research Project
- Role: End to End
- SoftWare: Pycharm; Mediapipe
- HardWare: Bus servo; USB Cam; Workstation
- Description: An attempt of connecting multiple bus servo with computer vision.

Background
Current interactive outdoor installations are mainly focusing on light, sound, or pure screen. We need something that can interact with tourists in the real world, or, in the physical world
Research
Outdoor physical interactions requires sufficient durability, and be windproof, rainproof and heatproof. However, the hardest problem is, this physical mechanic should be safe and strong for naughty children.
Mediapipe: The computer vision network I choose is MediaPipe, which is lightweight and could be run with a pure CPU. MediaPipe Link In the following versions, we feed separated video streams to the MediaPipe and make it possible for multiple pose recognition.

V2 | Model_One
- Date: 2021 SEP
- Type: Research Project
- Role: End to End
- SoftWare: Pycharm; Mediapipe
- HardWare: Bus servo; USB Cam; 3D print resin
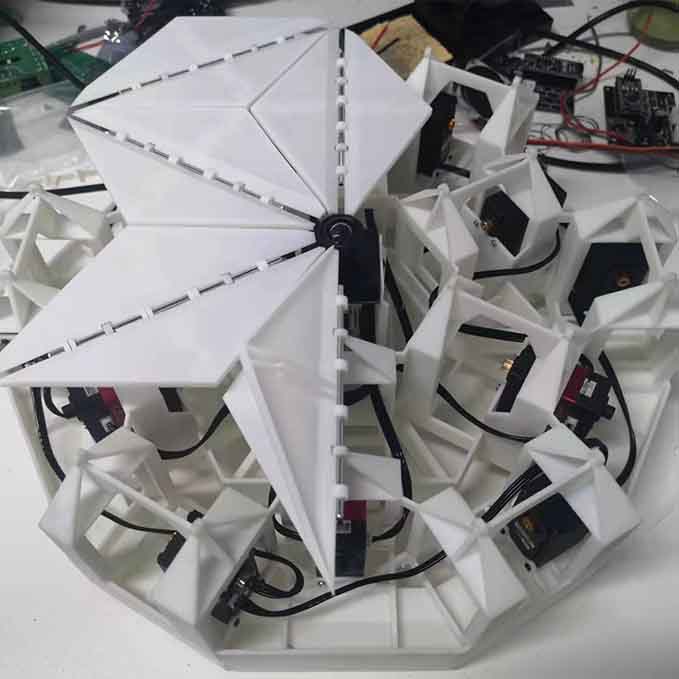
- Description: An installation that put everything together and is possible for people to play with.
Research
By putting everything together, we need to find out the difference between design and reality.
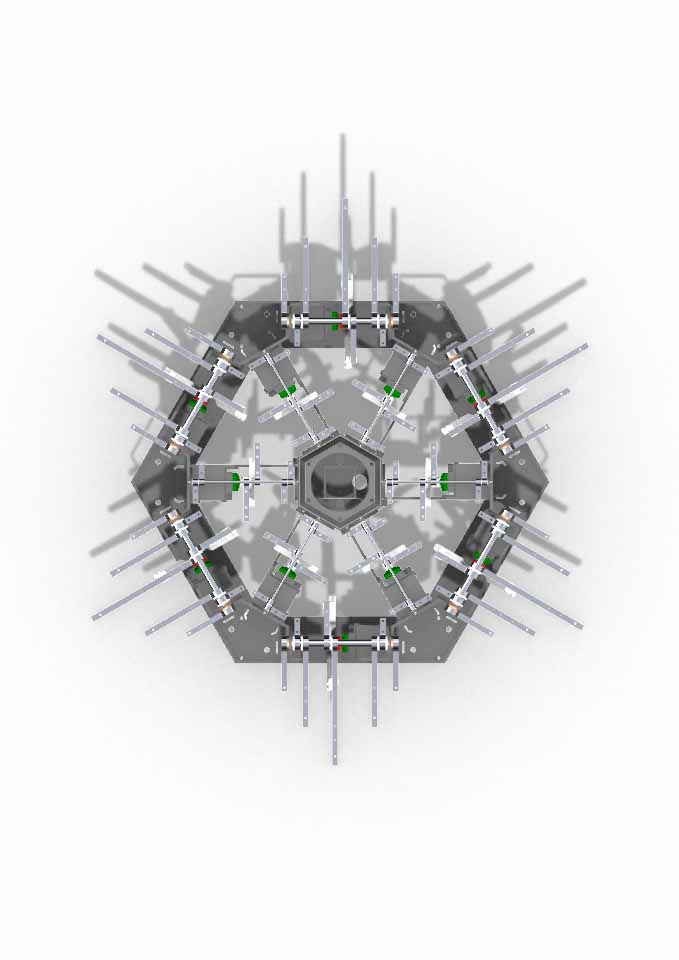
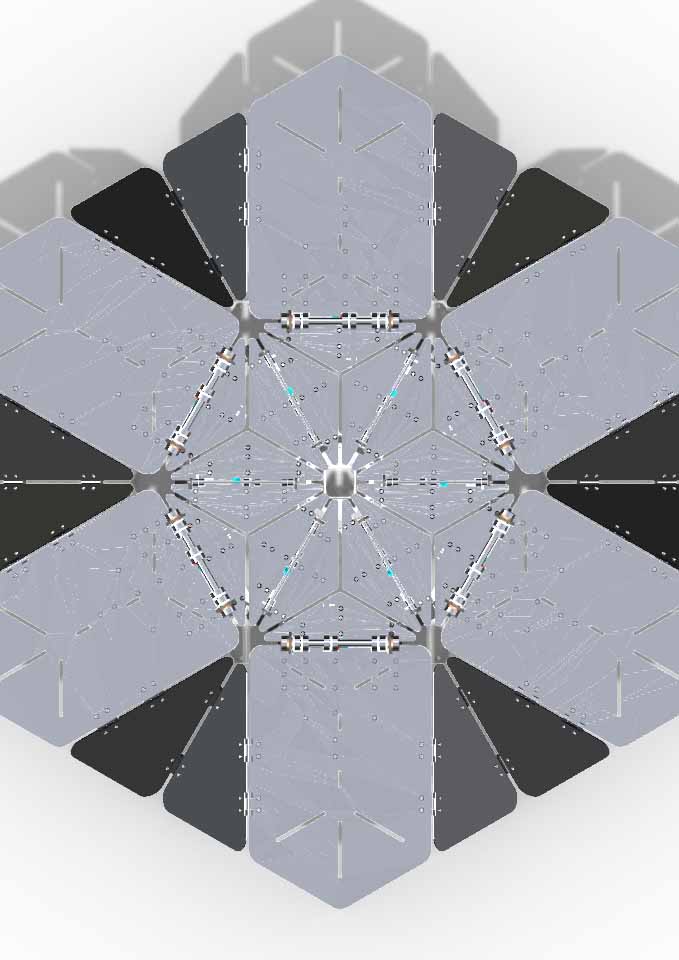
Moving Structure: The key is to find the balance between supporting weight and moving strength. Thus for the 3d print structure, plenty of beams are added up.
V3 | Model_Two
- Date: 2022 JAN
- Type: Research Project
- Role: End to End
- SoftWare: Pycharm; Mediapipe
- HardWare: Bus servo; USB Cam; 3D print nylon; 201 staineless steel; Copper shaft sleeve
- Description: Luckily, my boss found this mechanical flower interesting, so I got the budget for the second version.
Research
The key problem for version two is safety: How to prevent cutting off a kid's curious finger when the arms move up and down.
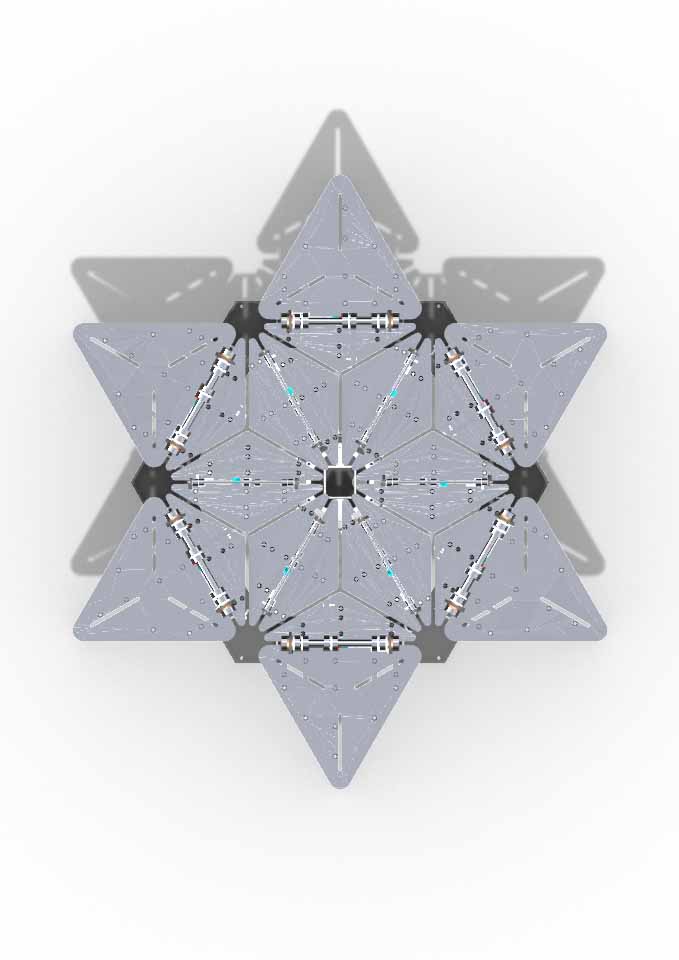
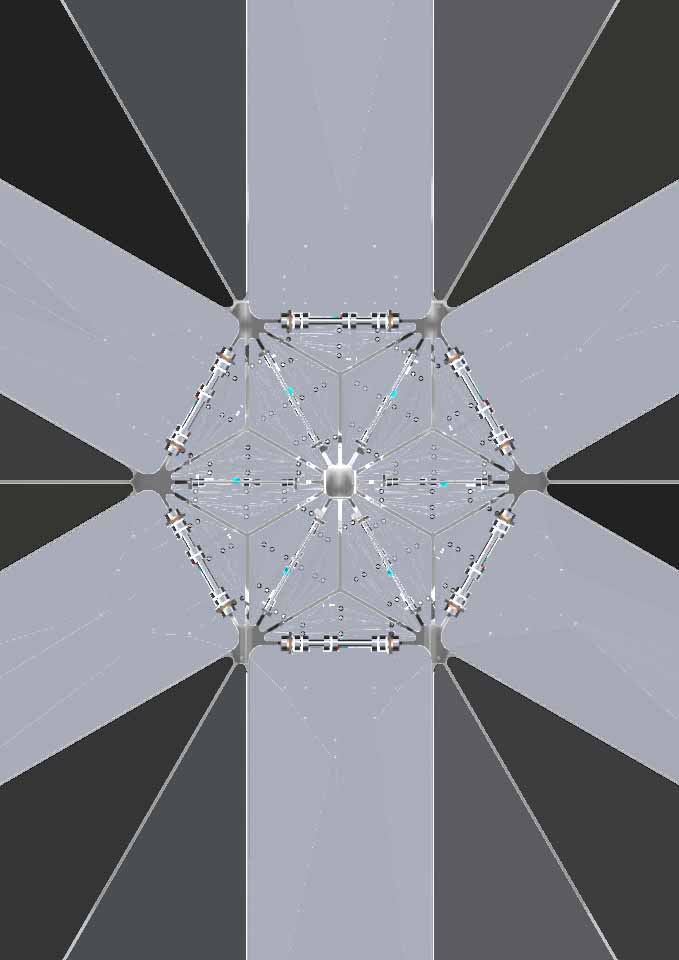
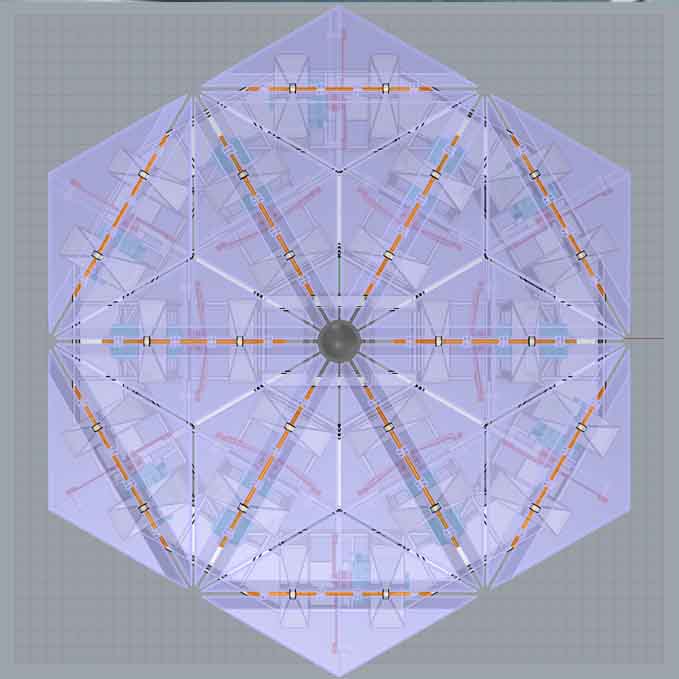
Moving Simulation: To achieve the 90° rotation angle, the L-shaped crank is introduced and tested in Rhino.
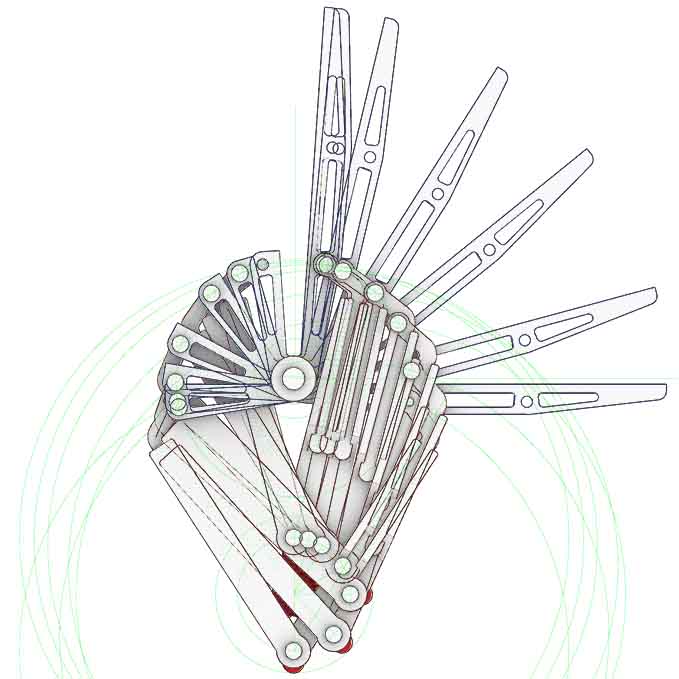
Magnetic Connection: To avoid getting stuck and building too much torque, the cranks are decomposed into two separate components. These components are attached to each other by magnets. The attached force is adjustable by adding or removing these magnets.

V4 | Model_Three
- Date: 2022 May
- Type: Landed Project
- Role: End to End
- SoftWare: Pycharm; Mediapipe
- HardWare: Bus servo; USB Cam; 3D print nylon; 201 staineless steel; Copper shaft sleeve
- Description: Landed in 2022 Shanghai Art Festival.