
AR TELESCOPE
This is the first AR project we setup in the wild. The key aspect of AR is to achieve a low latency between the real telescope and the virtual one under a limited computing power. As the Head of Art Customization Department and a member of the Computer Vision Algorithm Engineer, I used angle sensor to measure the horizontal rotation, then synchronizing it with a virtual camera within the Unity 3D program. This successfully integration of real and virtual perspectives paved the way for the creation of the following fully-functional AR series.
Validation Model Prototype New ApproachV1 | Validation Model
- Date: 2021 MAR
- Type: System Design
- Role: Software & Hardware Designer
- SoftWare: Rhinoceros, Unity 3D
- HardWare: Angle Sensor, 3D printing, mini computer, etc.
- Description: A simple yet effective prototype combining an angle sensor and a mini computer to test the feasibility and latency.
Engineering Feasibility
The Validation Model was fundamental in testing the latency between real-world angle changes and its virtual representation. By linking the angle sensor to the rendering camera in the Unity 3D environment, we achieved promising results showing acceptable latency at moderate moving speed. However, this Validation Model looks a complete messy, and was disassembled just after the validation is done, leaving no photo documentation except for the Rhino model.
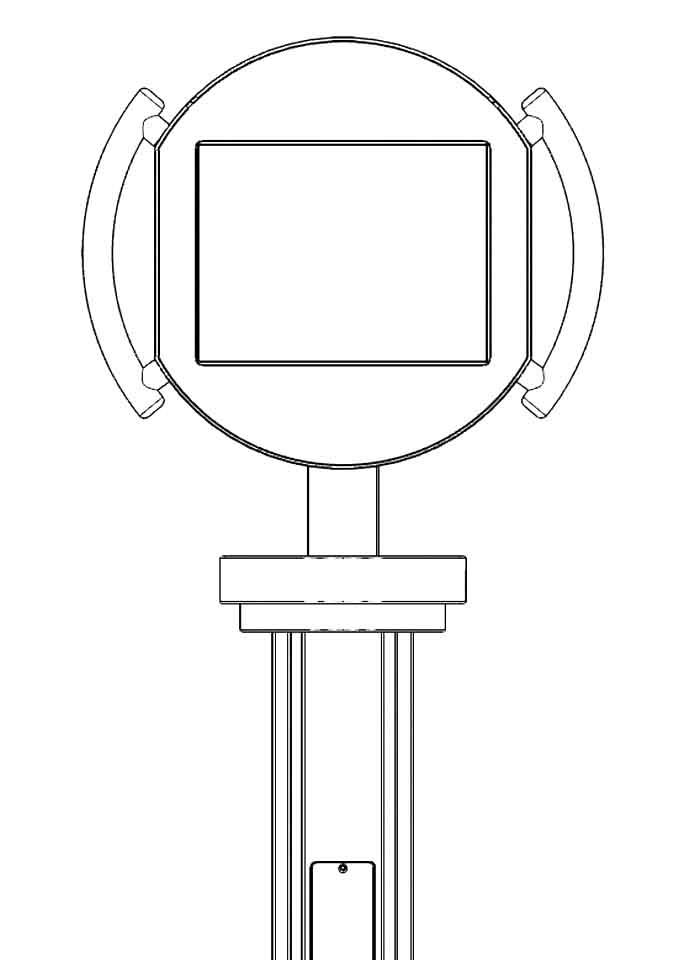
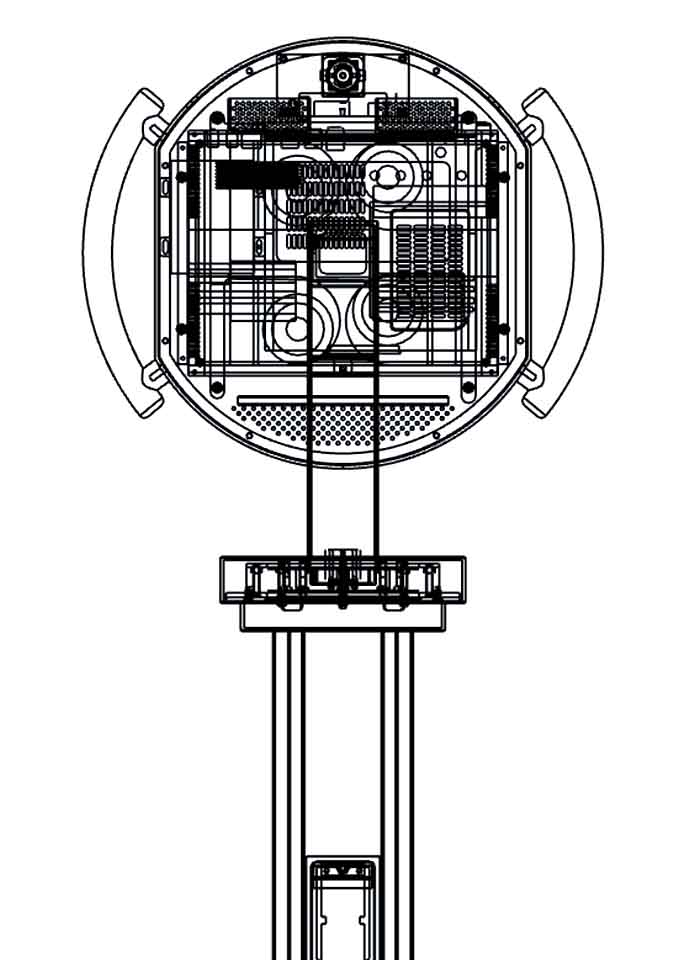
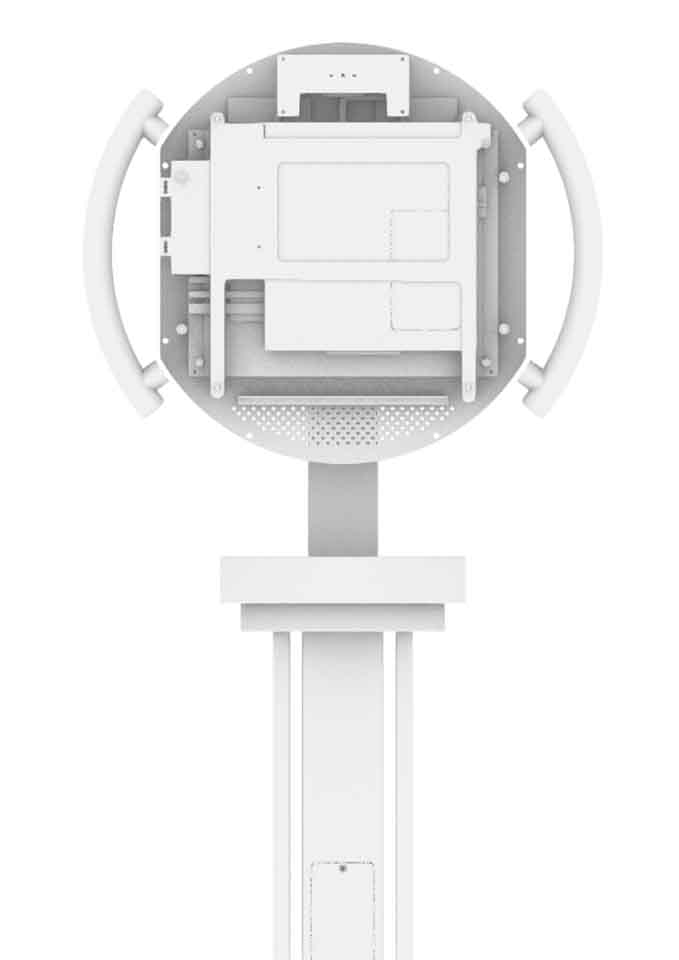
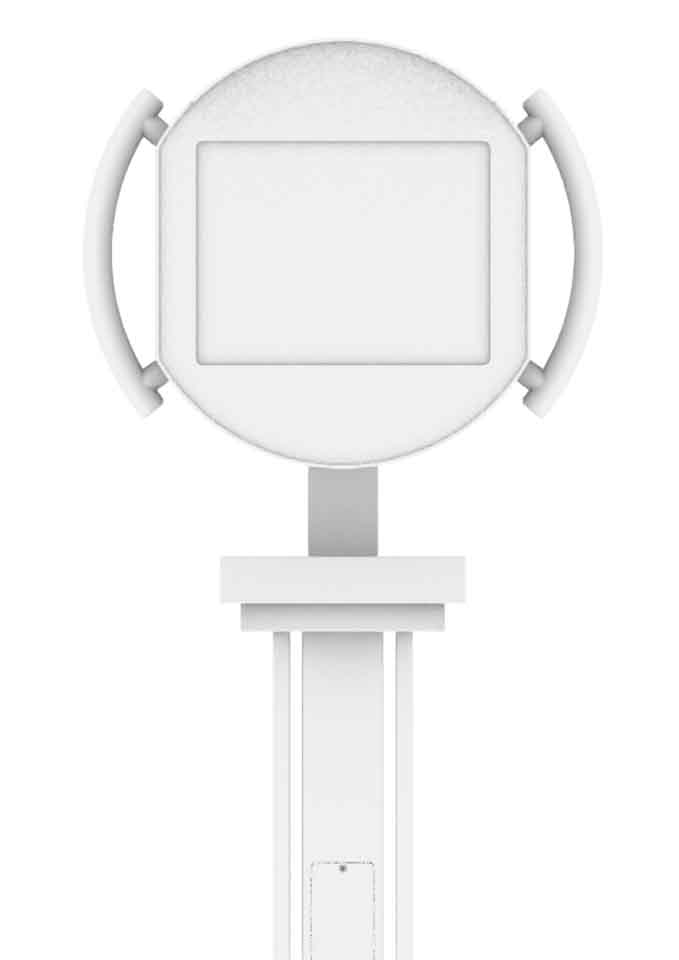
V2 | Prototype
- Date: 2021 APR-MAY
- Type: Grounded Prototype
- Role: Product Manager
- SoftWare: Rhino
- Description: Everything is in a rush, we compactly integrated a cross roller bearings, an angle sensor, a mini-computer, a touch screen, 4G router, cooling system, and a stabilized power supply into the confined space of our first prototype housing. Then this prototype was installed at the site.

AR Content
This prototype served primarily for ecological and educational purposes. We meticulously remodeled the site's landscape and vegetation using Unity 3D, rendering the scenery across all four seasons with added explanatory overlays. Visitors could point the telescope at specific plants and observe their seasonal transformations, gaining an immersive and informative view of the natural world. This integration of virtual reality with real-life botanical education provided a unique, interactive learning experience, allowing users to explore and understand the environment in a novel and engaging way.

V3 | New Approach
- Date: 2023 MAR
- Type: System Design
- Role: Software & Hardware Designer
- SoftWare: Rhinoceros, Unity 3D
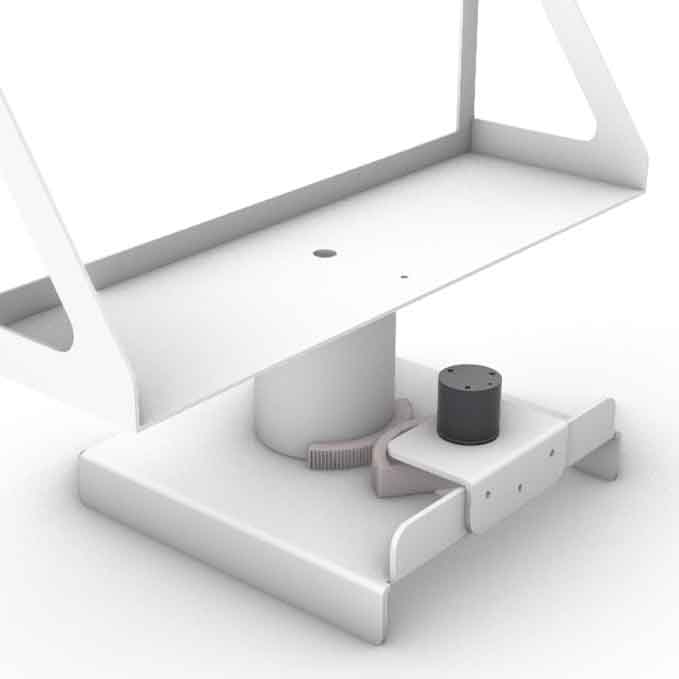
- HardWare: Gravity Sensor, 3D printing, mini computer, etc.
- Description: A personal interest of trying another technical route using two axis gravity sensor.

Shifting Axis
Accurately determining the telescope's xy and yz plane tilt angles posed a significant challenge. Angle sensors were complex and costly. IMUs struggled with drift and repositioning issues after restarts, and geomagnetic sensors were susceptible to interference. Recognizing that gravity sensor could measure tilts in the xz and yz planes, I devised a solution. By converting the telescope's horizontal rotation into xz rotation via a gear system, and utilizing the known xz and yz tilt angles along with the gear transmission ratio, we could accurately infer the horizontal rotation angle in Unity 3D. This innovative approach effectively circumvented the limitations of traditional sensors, ensuring precise orientation tracking for the AR experience.